Usted está aquí
Diseño y Fabricación de microrobots: La Nueva Generación de Instrumentos en Cirugías Robotizadas
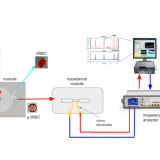
Las cirugías que usan un láser como bisturí ofrecen varias ventajas como sellar los vasos sanguíneos y reducir el sangrado, la hinchazón, las cicatrices, el dolor, las infecciones y la duración del período de recuperación. Antes del 2015, se usaba únicamente un láser como bisturí en intervenciones quirúrgicas en áreas como oftalmología, dermatología y siempre con la fuente de láser colocada fuera del cuerpo humano. Sin embargo, recientemente se están desarrollando sistemas que incorporan un bisturí láser robótico en miniatura dentro del cuerpo humano (Fig. 1). Estos dispositivos médicos tienen como objetivo principal ser cada vez menos invasivos para el paciente. Esto es posible gracias a la creación de sistemas quirúrgicos teleoperados basados en microrobots como efectores finales, como ejemplo tenemos un laringoscopio ajustable para poder insertar el microrobot y las cámaras dentro del cuerpo del paciente.

Fig. 1. Concept of µRALP project. La estrategia general es elaborar una base común para el análisis, diseño y control de sistemas microrobóticos médicos para microscirugías
láser basados en las necesidades y especificaciones provenientes del área médica.[1]
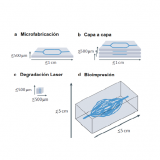
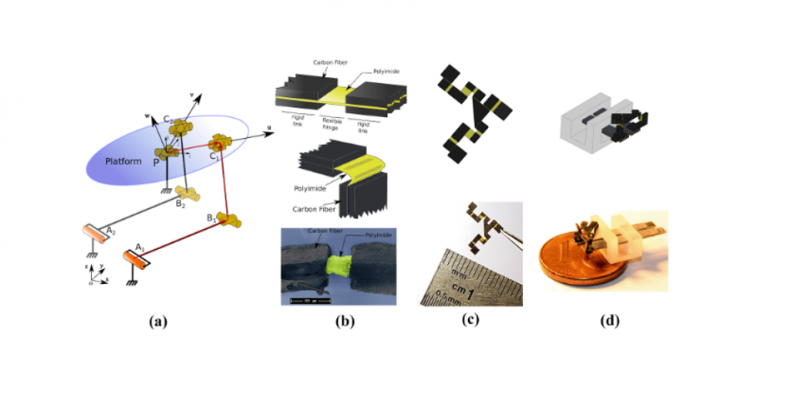
Para crear la estructura compleja 3D a pequeña escala de un microrobot (Fig. 2), se usan materiales flexibles y rígidos que se combinan en una estructura plana monolítica que luego se pliega para obtener una estructura mecánica compleja y rígida. El Smart Composite Microstructure (SCM) permite desarrollar microrobots porque puede combinar materiales piezoeléctricos, fibras de carbono y materiales poliméricos (polimida) en tamaños pequeños. Las ventajas de la tecnología de microfabricación SCM son su simplicidad para fabricar pequeños mecanismos 3D y su capacidad para crear bisagras de flexión con un mayor rango de movimiento que las fabricadas en silicio. Además, la técnica SCM produce mejoras notables sin causar fracturas ni fatiga rápida en la estructura operativa. Debido al proceso de fabricación de SCM y por la naturaleza de los materiales utilizados, se observan incertidumbres en los ángulos, las direcciones de los ejes y las posiciones de los puntos en las juntas de flexión. Estas incertidumbres influyen en gran medida en la precisión del efector final del microrobot.
Muy importante, una pequeña incertidumbre en una articulación es amplificada y transmitida por el resto de la estructura hasta el efector final (propagación de incertidumbres). Desafortunadamente, no todas las incertidumbres se pueden cancelar y se necesita un método para estimar la incertidumbre del efector final residual. Esto impacta significativamente en el desarrollo de los microrobots. Una vez diseñada la estructura mecánica del microrobot, este necesita pasar por múltiples test que validen su correcto funcionamiento. Así que los microrobots que se encuentran en desarrollo deben someterse a varias pruebas para obtener las certificaciones obligatorias para su comercialización y uso en pacientes.

Fig. 2. Fabricación del microrobot. (a) Mecanismo de operación. (b) Modelo CAD de una bisagra extendida y doblada con su imagen SEM pseudocoloreada fabricada por SCM que
muestra la fibra de carbono junto con la polimida. (c) Diseño 1D en CAD y su implementación de forma planar. (D) Diseño 3D de la estructura plegada y la implementación final del microrobot. [2]
De hecho, una de las principales pruebas a validar es la determinación precisa de su fiabilidad y vida útil remanente para asegurar un rendimiento óptimo durante el procedimiento quirúrgico. El enfoque de pronóstico y gestión de salud (PHM) incorpora muchas habilidades de evaluación desde la observación hasta la fase de decisión. Los sistemas de PHM son algunos de los principales protagonistas de la revolución de la Industria 4.0 cuyos principales desafíos son detectar de manera eficiente si un componente de un sistema se ha desviado de su condición de funcionamiento normal o predecir cuándo ocurrirá alguna falla. Los métodos PHM eficientes prometen disminuir la probabilidad de eventos de fallas extremas, mejorando así el nivel de seguridad de los equipos como son los robots biomédicos que operan en procesos muy cruciales donde una pequeña desviación podría ser fatal para la vida de un paciente.
Para estimar la RUL de los sistemas existen varias metodologías y técnicas de pronóstico y se clasifican en cuatro grupos. (1) Los enfoques basados en la experiencia usan la distribución de registros de eventos de una población de un elemento idéntico, se pueden implementar cuando los datos históricos de reparación y falla están disponibles y no consideran la indicación de falla para predecir la vida útil. (2) Los enfoques basados en modelos usan modelos matemáticos dinámicos, que pueden ser modelos basados en la física y modelos estadísticos. (3) Los enfoques basados en el conocimiento suelen ser resueltos por especialistas humanos, por ejemplo, sistemas expertos y sistemas de lógica difusa se usan para el diagnóstico de fallas. (4) Los enfoques basados en datos se basan en técnicas estadísticas y de machine learning, por ejemplo, métodos estadísticos multivariados, redes neuronales, redes bayesianas y modelos ocultos de Markov.
Estas últimas están siendo muy utilizadas sin embargo existen varios desafíos del mantenimiento preventivo en las líneas de producción desde una perspectiva de machine learning. Primero, es realmente difícil adquirir datos de mal funcionamiento de la máquina y etiquetar el caso de falla en la práctica en el set de datos. En segundo lugar, existe una gran cantidad de datos para procesar (big data) generados por los actuadores, y el procesamiento de esta big data requiere una infraestructura especial, conocimiento experto y software inteligente personalizado. Por último, muchas empresas de tecnología no comparten este tipo de datos públicamente debido a la privacidad de los datos y, como tal, los investigadores no pueden validar nuevos modelos con más set de datos.

Fig. 3:Arquitectura conceptual para el mantenimiento preventivo activo de equipos complejos. Incluye cuatro módulos principales: (1) configuración de equipos inteligentes,
(2) recopilación de datos operativos, (3 ) mantenimiento preventivo activo basado en análisis de datos en tiempo real, y (4) predicción de RUL basada en análisis de datos que no son en tiempo real. [7]
Actualmente profesores de Bioingeniería de UTEC se encuentran colaborando en el desarrollo y construcción de microrobots con el FEMTO-ST Institute y AMAROB Technologies, ambas instituciones de Francia. Si estás interesado en ser parte de construir microrobots y de proyectos similares que esperas: ¡Únete a Bioingeniería de la UTEC!
References:
-
Pasaguayo, L., Z. A. Masry, and S. Lescano (2021). Degradation modeling analysis for micro-robots flexure hinges using intracorporeal surgeries. Proceedings of the 31th European Safety and Reliability Conference.
-
Lescano S., Rakotondrabe M., Andreff N. Precision Prediction Using Interval Exponential Mapping of a Parallel Kinematic Smart Composite Microstructure. RSJ International Conference on Intelligent Robots and Systems, Sep 2015, Hamburg, Germany. Hal-02868200
-
R. Zemouri, Z. Al Masry, I. Remadna, L.S. Terrissa, N. ZerhouniHybrid Architecture of Deep Convolutional Variational Auto-encoder for Remaining useful Life Prediction, 2020
-
E.R Leighton, P.A. Cárdenas Lizana. Control System based on Reinforcement Learning applied to a Klatt-Engell Reactor. 2020 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE)
-
Ning Wang et al. An active preventive maintenance approach of complex equipment based on a novel product-service system operation mode, Journal of Cleaner Production, 2020.
-
Kang, Ziqiu et al. “Remaining Useful Life (RUL) Prediction of Equipment in Production Lines Using Artificial Neural Networks.” Sensors (Basel, Switzerland) vol. 21,3 932. 30 Jan. 2021.
-
Luca Biggio et al. Prognostics and Health Management of Industrial Assets: Current Progress and Road Ahead. REVIEW article Front. Artif. Intell., 09 November 2020
-
Atamuradov, V., and N. Zerhouni (2017, December). Prognostics and health management for maintenance practitioners-review, implementation and tools evaluation. Journal of Prognostics and Health Management.
EN UTEC VENIMOS DESARROLLANDO LA TECNOLOGÍA
Y LA INGENIERÍA QUE NECESITA EL MUNDO DEL MAÑANA
Carreras en ingeniería y tecnología que van de la mano con la investigación y la creación de soluciones tecnológicas de vanguardia, comprometidas con las necesidades sociales y la sostenibilidad.
Decide convertirte en el profesional que el mundo necesita. Estudia en UTEC y lleva tu ingenio hacia el futuro.