You are here
Bobelto, el robot submarino desarrollado por alumnos de UTEC para la investigación del mar peruano y los efectos de su contaminación
El mar peruano es uno de los más productivos y diversos del mundo, donde habitan casi 4500 especies, entre peces, moluscos, algas, crustáceos, cetáceos, etc. Sin embargo, a inicios de este año, sufrió un suceso que Naciones Unidas calificó como “el peor desastre ecológico del Perú en su historia reciente”: el derrame de 11,900 barriles de petróleo. Este no sería un hecho aislado, pues entre enero del 2011 y enero del 2022, se registraron 144 eventos de este tipo en la costa; es decir, un promedio de 12 tragedias ambientales por año.
Para poder estudiar el mar peruano y preservar su biodiversidad, a inicios de 2020, cuatro alumnos de UTEC y miembros GIIT Robotics, organización estudiantil que impulsa el desarrollo de la robótica, formaron Blume Team, con la meta de construir un robot submarino (ROV) para exploración. Es así como Oscar Castro (Ingeniería Mecatrónica), Marco Orellana (Ingeniería Mecánica), Emilio Granados (Ingeniería Mecánica) y Alessandro Giuffra (Ingeniería Electrónica) iniciaron el desarrollo de Bobelto.
“Descartamos la idea de elaborar un robot terrestre y aéreo, porque vimos otros equipos enfocándose en ello. Decidimos centrarnos en el agua. Allí, observamos varias problemáticas. Por eso, Bobelto tiene como objetivo explorar el mar peruano y colaborar con otros investigadores para su conservación. Además, queremos contribuir, a nivel mundial, con el desarrollo de tecnología especializada en el océano”, asegura Oscar, quien lidera el equipo.
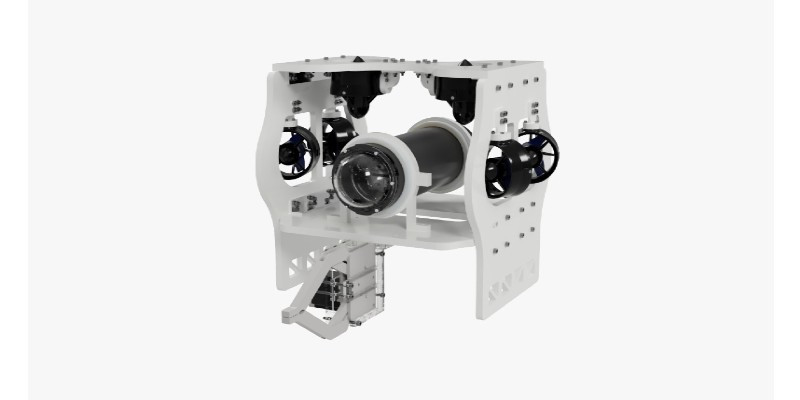
Actualmente, son 40 los estudiantes de UTEC que se encuentran trabajando en el proyecto. Además, durante julio, culminaron el segundo prototipo de Bobelto, el cual puede ser controlado remotamente a través de una laptop, donde también se puede observar aquello que el ROV enfoca con la ayuda de una cámara.
“Lo que estamos haciendo ahora es modelar matemáticamente, a mayor detalle, el robot, con el fin de conseguir el siguiente paso: que pueda moverse autónomamente. Para eso, necesitamos que el control implementado sea más robusto y pueda mantener su estabilidad ante disturbios como las corrientes marinas”, añade.
Con el propósito de conectar la tecnología con investigadores de ciencias naturales ―como biólogos, oceanógrafos y afines―, Blume Team ha creado una subárea enfocada en Ingeniería Ambiental. Por otro lado, buscan convertirse en una startup para financiar proyectos más ambiciosos.
“Nos encontramos explorando el mercado de la acuicultura con la finalidad de convertirnos en una herramienta útil para disminuir los riesgos de los buzos marinos en las tareas de mantenimiento de redes y recolección de material biológico”, enfatiza Oscar.
Bobelto se presenta internacionalmente
Durante el 2021, los estudiantes presentaron el ROV en INTERCON, una conferencia altamente técnica organizada por el Institute of Electrical and Electronics Engineers (IEEE). Por otro lado, a mediados de 2022, Blume Team tuvo la oportunidad de participar en el MATE ROV, donde Bobelto compitió contra 19 equipos globales que presentaron proyectos de robótica submarina. Para poder presentarse el próximo año, el equipo está en búsqueda de apoyo y financiamiento.
Tecnologías detrás del mar
Las tecnologías utilizadas para diseñar el robot se enfocaron en tres áreas: mecánica, electrónica y software. En la parte mecánica, el primer paso fue conocer las propiedades de los materiales y aprender a utilizar herramientas de fabricación digital (impresoras 3D, corte láser y CNC). Las simulaciones ayudaron a identificar los puntos críticos de la estructura de Bobelto, así como las presiones máximas que puede soportar la estructura. Asimismo, gracias a las técnicas de sellado, se pudieron mantener los componentes electrónicos en un depósito hermético.
“Con respecto al área electrónica, se seleccionaron los microcontroladores y procesadores a utilizar, de acuerdo con los requerimientos del robot. También se usaron diferentes protocolos de comunicación, como I2C, SPI, ETHERNET; y se integraron todos los componentes a través del uso de placas electrónicas”, afirma Oscar.
Por el lado del software, se empleó Python como lenguaje de programación principal. Se utilizó ROS como framework, para poder manejar todos los datos de los sensores y actuadores. Además, se usaron las librerías de OpenCV y TensorFlow para aplicar visión artificial y que el robot pueda identificar ciertos objetos bajo el agua. Por último, se diseñó la interfaz gráfica para conectar al robot con el piloto mediante flutter dart.
EN UTEC VENIMOS DESARROLLANDO LA TECNOLOGÍA
Y LA INGENIERÍA QUE NECESITA EL MUNDO DEL MAÑANA
Carreras en ingeniería y tecnología que van de la mano con la investigación y la creación de soluciones tecnológicas de vanguardia, comprometidas con las necesidades sociales y la sostenibilidad.
Decide convertirte en el profesional que el mundo necesita. Estudia en UTEC y lleva tu ingenio hacia el futuro.